本文转载自:如果这篇文章说不清epoll的本质,那就过来掐死我吧!
从事服务端开发,少不了要接触网络编程。epoll作为linux下高性能网络服务器的必备技术至关重要,nginx、redis、skynet和大部分游戏服务器都使用到这一多路复用技术。
因为epoll的重要性,不少游戏公司(如某某九九)在招聘服务端同学时,可能会问及epoll相关的问题。比如epoll和select的区别是什么?epoll高效率的原因是什么?如果只靠背诵,显然不能算上深刻的理解。
网上虽然也有不少讲解epoll的文章,但要不是过于浅显,就是陷入源码解析,很少能有通俗易懂的。于是决定编写此文,让缺乏专业背景知识的读者也能够明白epoll的原理。文章核心思想是:
要让读者清晰明白EPOLL为什么性能好。
本文会从网卡接收数据的流程讲起,串联起CPU中断、操作系统进程调度等知识;再一步步分析阻塞接收数据、select到epoll的进化过程;最后探究epoll的实现细节。
一、从网卡接收数据说起
下图是一个典型的计算机结构图,计算机由CPU、存储器(内存)、网络接口等部件组成。了解epoll本质的第一步,要从硬件的角度看计算机怎样接收网络数据。
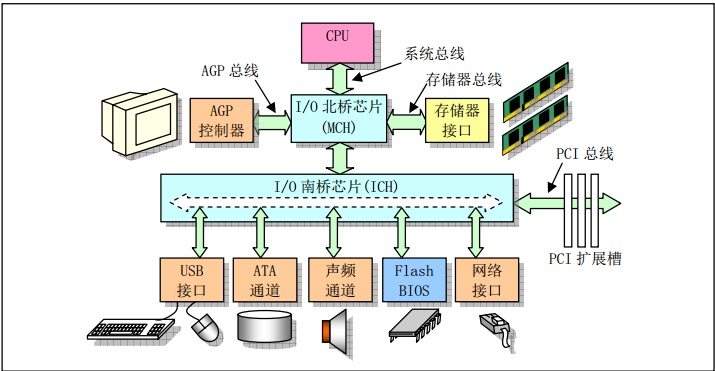
计算机结构图(图片来源:linux内核完全注释之微型计算机组成结构)
下图展示了网卡接收数据的过程。在①阶段,网卡收到网线传来的数据;经过②阶段的硬件电路的传输;最终将数据写入到内存中的某个地址上(③阶段)。这个过程涉及到DMA传输、IO通路选择等硬件有关的知识,但我们只需知道:网卡会把接收到的数据写入内存。
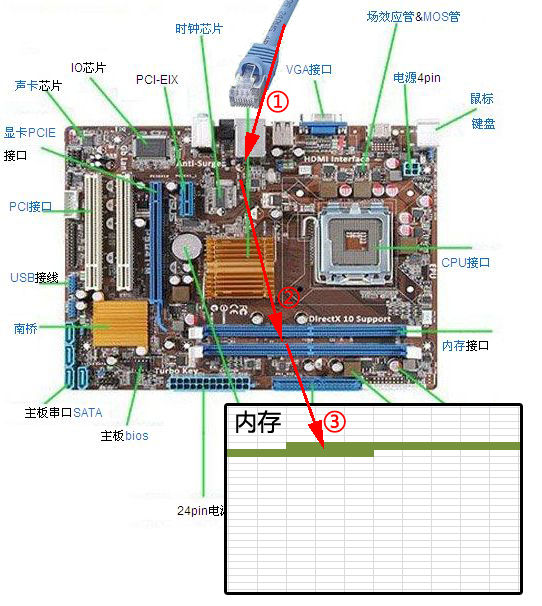
网卡接收数据的过程
通过硬件传输,网卡接收的数据存放到内存中。操作系统就可以去读取它们。
二、如何知道接收了数据?
了解epoll本质的第二步,要从CPU的角度来看数据接收。要理解这个问题,要先了解一个概念——中断。
计算机执行程序时,会有优先级的需求。比如,当计算机收到断电信号时(电容可以保存少许电量,供CPU运行很短的一小段时间),它应立即去保存数据,保存数据的程序具有较高的优先级。
一般而言,由硬件产生的信号需要cpu立马做出回应(不然数据可能就丢失),所以它的优先级很高。cpu理应中断掉正在执行的程序,去做出响应;当cpu完成对硬件的响应后,再重新执行用户程序。中断的过程如下图,和函数调用差不多。只不过函数调用是事先定好位置,而中断的位置由“信号”决定。
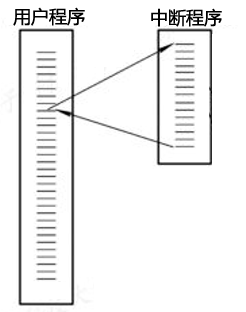
中断程序调用
以键盘为例,当用户按下键盘某个按键时,键盘会给cpu的中断引脚发出一个高电平。cpu能够捕获这个信号,然后执行键盘中断程序。下图展示了各种硬件通过中断与cpu交互。

cpu中断(图片来源:net.pku.edu.cn)
现在可以回答本节提出的问题了:当网卡把数据写入到内存后,网卡向cpu发出一个中断信号,操作系统便能得知有新数据到来,再通过网卡中断程序去处理数据。
三、进程阻塞为什么不占用cpu资源?
了解epoll本质的第三步,要从操作系统进程调度的角度来看数据接收。阻塞是进程调度的关键一环,指的是进程在等待某事件(如接收到网络数据)发生之前的等待状态,recv、select和epoll都是阻塞方法。了解“进程阻塞为什么不占用cpu资源?”,也就能够了解这一步。
为简单起见,我们从普通的recv接收开始分析,先看看下面代码:
//创建socket
int s = socket(AF_INET, SOCK_STREAM, 0);
//绑定
bind(s, ...)
//监听
listen(s, ...)
//接受客户端连接
int c = accept(s, ...)
//接收客户端数据
recv(c, ...);
//将数据打印出来
printf(...)
这是一段最基础的网络编程代码,先新建socket对象,依次调用bind、listen、accept,最后调用recv接收数据。recv是个阻塞方法,当程序运行到recv时,它会一直等待,直到接收到数据才往下执行。
那么阻塞的原理是什么?
工作队列
操作系统为了支持多任务,实现了进程调度的功能,会把进程分为“运行”和“等待”等几种状态。运行状态是进程获得cpu使用权,正在执行代码的状态;等待状态是阻塞状态,比如上述程序运行到recv时,程序会从运行状态变为等待状态,接收到数据后又变回运行状态。操作系统会分时执行各个运行状态的进程,由于速度很快,看上去就像是同时执行多个任务。
下图中的计算机中运行着A、B、C三个进程,其中进程A执行着上述基础网络程序,一开始,这3个进程都被操作系统的工作队列所引用,处于运行状态,会分时执行。
工作队列中有A、B和C三个进程
等待队列
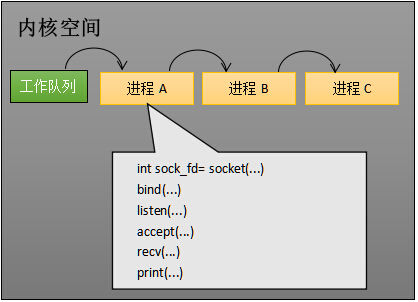
当进程A执行到创建socket的语句时,操作系统会创建一个由文件系统管理的socket对象(如下图)。这个socket对象包含了发送缓冲区、接收缓冲区、等待队列等成员。等待队列是个非常重要的结构,它指向所有需要等待该socket事件的进程。
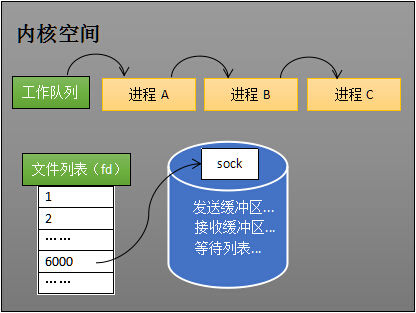
创建socket
当程序执行到recv时,操作系统会将进程A从工作队列移动到该socket的等待队列中(如下图)。由于工作队列只剩下了进程B和C,依据进程调度,cpu会轮流执行这两个进程的程序,不会执行进程A的程序。所以进程A被阻塞,不会往下执行代码,也不会占用cpu资源。

socket的等待队列
ps:操作系统添加等待队列只是添加了对这个“等待中”进程的引用,以便在接收到数据时获取进程对象、将其唤醒,而非直接将进程管理纳入自己之下。上图为了方便说明,直接将进程挂到等待队列之下。
唤醒进程
当socket接收到数据后,操作系统将该socket等待队列上的进程重新放回到工作队列,该进程变成运行状态(当socket事件触发时,也就是有数据到来,会取下一个进程结构调用其回调,将其挂到工作队列中),继续执行代码。也由于socket的接收缓冲区已经有了数据,recv可以返回接收到的数据。
四、内核接收网络数据全过程
这一步,贯穿网卡、中断、进程调度的知识,叙述阻塞recv下,内核接收数据全过程。
如下图所示,进程在recv阻塞期间,计算机收到了对端传送的数据(步骤①)。数据经由网卡传送到内存(步骤②),然后网卡通过中断信号通知cpu有数据到达,cpu执行中断程序(步骤③)。此处的中断程序主要有两项功能,先将网络数据写入到对应socket的接收缓冲区里面(步骤④),再唤醒进程A(步骤⑤),重新将进程A放入工作队列中。

内核接收数据全过程
唤醒进程的过程如下图所示。

唤醒进程
以上是内核接收数据全过程
这里留有两个思考题,大家先想一想。
其一,操作系统如何知道网络数据对应于哪个socket?
其二,如何同时监视多个socket的数据?
公布答案的时刻到了。
第一个问题:因为一个socket对应着一个端口号,而网络数据包中包含了ip和端口的信息,内核可以通过端口号找到对应的socket。当然,为了提高处理速度,操作系统会维护端口号到socket的索引结构,以快速读取。(就是说网卡中断CPU后,CPU的中断函数从网卡存数据的内存拷贝数据到对应fd的接收缓冲区,具体是哪一个fd,CPU会检查port,放到对应的fd中)
第二个问题是多路复用的重中之重,是本文后半部分的重点!
五、同时监视多个socket的简单方法
服务端需要管理多个客户端连接,而recv只能监视单个socket,这种矛盾下,人们开始寻找监视多个socket的方法。epoll的要义是高效的监视多个socket。从历史发展角度看,必然先出现一种不太高效的方法,人们再加以改进。只有先理解了不太高效的方法,才能够理解epoll的本质。
假如能够预先传入一个socket列表,如果列表中的socket都没有数据,挂起进程,直到有一个socket收到数据,唤醒进程。这种方法很直接,也是select的设计思想。
为方便理解,我们先复习select的用法。在如下的代码中,先准备一个数组(下面代码中的fds),让fds存放着所有需要监视的socket。然后调用select,如果fds中的所有socket都没有数据,select会阻塞,直到有一个(也可以是多个)socket接收到数据,select返回,唤醒进程。用户可以遍历fds,通过FD_ISSET判断具体哪个socket收到数据,然后做出处理。
int s = socket(AF_INET, SOCK_STREAM, 0);
bind(s, ...)
listen(s, ...)
int fds[] = 存放需要监听的socket
while(1){
int n = select(..., fds, ...)
for(int i=0; i < fds.count; i++){
if(FD_ISSET(fds[i], ...)){
//fds[i]的数据处理
}
}
}
select的流程
select的实现思路很直接。假如程序同时监视如下图的sock1、sock2和sock3三个socket,那么在调用select之后,操作系统把进程A(包括了select逻辑)分别加入这三个socket的等待队列中(前文说过,放的其实是进程A的引用)。
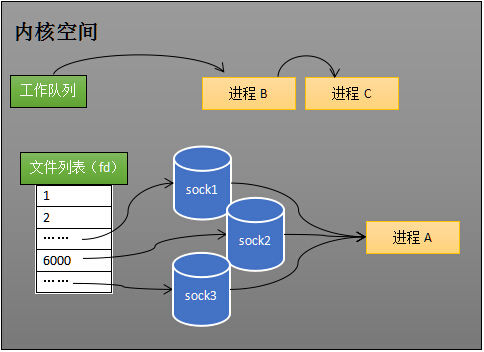
操作系统把进程A分别加入这三个socket的等待队列中
当任何一个socket收到数据后,中断程序将唤起进程。下图展示了sock2接收到了数据的处理流程。
ps:recv和select的中断回调可以设置成不同的内容。

sock2接收到了数据,中断程序唤起进程A
所谓唤起进程,就是将进程从所有的等待队列中移除,加入到工作队列里面。如下图所示。

将进程A从所有等待队列中移除,再加入到工作队列里面
经由这些步骤,当进程A被唤醒后,它知道至少有一个socket接收了数据。程序只需遍历一遍socket列表,就可以得到就绪的socket。
这种简单方式行之有效,在几乎所有操作系统都有对应的实现。
select的缺点:
但是简单的方法往往有缺点,主要是:
其一,每次调用select都需要将进程加入到所有监视socket的等待队列,每次唤醒都需要从每个队列中移除。这里涉及了两次遍历(遍历进程A关心的所有socket,需要注意的是添加从等待队列头部添加,删除通过回调直接实现,所以每个socket的等待队列不用遍历),而且每次都要将整个fds列表传递给内核,有一定的开销。正是因为遍历操作开销大,出于效率的考量,才会规定select的最大监视数量,默认只能监视1024个socket。
其二,进程被唤醒后,程序并不知道哪些socket收到数据,还需要遍历一次(这一次遍历是在应用层)。
那么,有没有减少遍历的方法?有没有保存就绪socket的方法?这两个问题便是epoll技术要解决的。
当程序调用select时,内核会先遍历一遍socket,如果有一个以上的socket接收缓冲区有数据,那么select直接返回,不会阻塞。这也是为什么select的返回值有可能大于1的原因之一。如果没有socket有数据,进程才会阻塞
六、epoll的设计思路
epoll是在select出现N多年后才被发明的,是select和poll的增强版本。epoll通过以下一些措施来改进效率。
措施一:功能分离
select低效的原因之一是将“维护等待队列”和“阻塞进程”两个步骤合二为一。如下图所示,每次调用select都需要这两步操作,然而大多数应用场景中,需要监视的socket相对固定,并不需要每次都修改。epoll将这两个操作分开,先用epoll_ctl维护等待队列,再调用epoll_wait阻塞进程(解耦)。显而易见的,效率就能得到提升。

相比select,epoll拆分了功能
为方便理解后续的内容,我们先复习下epoll的用法。如下的代码中,先用epoll_create创建一个epoll对象epfd,再通过epoll_ctl将需要监视的socket添加到epfd中,最后调用epoll_wait等待数据。
int s = socket(AF_INET, SOCK_STREAM, 0);
bind(s, ...)
listen(s, ...)
int epfd = epoll_create(...);
epoll_ctl(epfd, ...); //将所有需要监听的socket添加到epfd中
while(1){
int n = epoll_wait(...)
for(接收到数据的socket){
//处理
}
}
功能分离,使得epoll有了优化的可能。
措施二:就绪列表
select低效的另一个原因在于程序不知道哪些socket收到数据,只能一个个遍历。如果内核维护一个“就绪列表”,引用收到数据的socket,就能避免遍历。如下图所示,计算机共有三个socket,收到数据的sock2和sock3被rdlist(就绪列表)所引用。当进程被唤醒后,只要获取rdlist的内容,就能够知道哪些socket收到数据。

这里引出了另一个问题:什么时候select优于epoll?
一般认为如果在并发量低,socket都比较活跃的情况下,select效率更高,也就是说活跃socket数目与监控的总的socket数目之比越大,select效率越高,因为select反正都会遍历所有的socket,如果比例大,就没有白白遍历。加之于select本身实现比较简单,导致总体现象比epoll好。
七、epoll的原理和流程
本节会以示例和图表来讲解epoll的原理和流程。
创建epoll对象
如下图所示,当某个进程调用epoll_create方法时,内核会创建一个eventpoll对象(也就是程序中epfd所代表的对象)。eventpoll对象也是文件系统中的一员,和socket一样,它也会有等待队列(有线程会等待其事件触发,比如调用epoll_wait的线程就会阻塞在其上)。

内核创建eventpoll对象
创建一个代表该epoll的eventpoll对象是必须的,因为内核要维护“就绪列表”等数据,“就绪列表”可以作为eventpoll的成员。
维护监视列表
创建epoll对象后,可以用epoll_ctl添加或删除所要监听的socket。以添加socket为例,如下图,如果通过epoll_ctl添加sock1、sock2和sock3的监视,内核会将eventpoll添加到这三个socket的等待队列中。

添加所要监听的socket
当socket收到数据后,中断程序会操作eventpoll对象,而不是直接操作进程(也就是调用epoll的进程)。
接收数据
当socket收到数据后,中断程序会给eventpoll的“就绪列表”添加socket引用。如下图展示的是sock2和sock3收到数据后,中断程序让rdlist引用这两个socket。
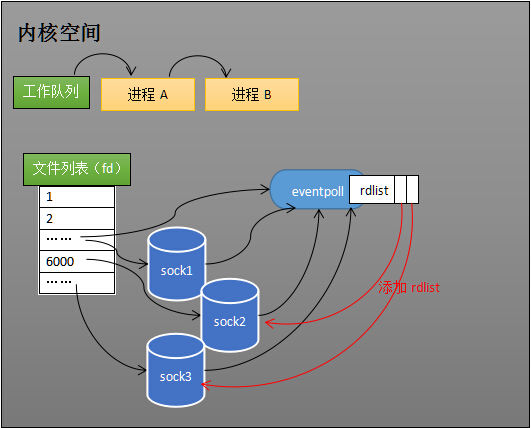
给就绪列表添加引用
eventpoll对象相当于是socket和进程之间的中介,socket的数据接收并不直接影响进程,而是通过改变eventpoll的就绪列表来改变进程状态。
当程序执行到epoll_wait时,如果rdlist已经引用了socket,那么epoll_wait直接返回,如果rdlist为空,阻塞进程。
阻塞和唤醒进程
假设计算机中正在运行进程A和进程B,在某时刻进程A运行到了epoll_wait语句。如下图所示,内核会将进程A放入eventpoll的等待队列中,阻塞进程。

epoll_wait阻塞进程
当socket接收到数据,中断程序一方面修改rdlist,另一方面唤醒eventpoll等待队列中的进程,进程A再次进入运行状态(如下图)。也因为rdlist的存在,进程A可以知道哪些socket发生了变化。
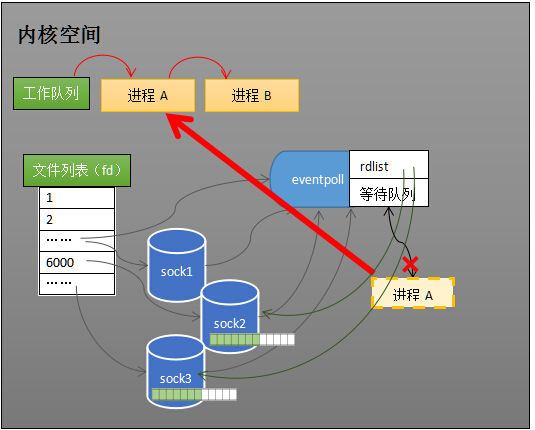
epoll唤醒进程
八、epoll的实现细节
至此,相信读者对epoll的本质已经有一定的了解。但我们还留有一个问题,eventpoll的数据结构是什么样子?
再留两个问题,就绪队列应该应使用什么数据结构?eventpoll应使用什么数据结构来管理通过epoll_ctl添加或删除的socket?
如下图所示,eventpoll包含了lock、mtx、wq(等待队列)、rdlist等成员。rdlist和rbr是我们所关心的。

epoll原理示意图,图片来源:《深入理解Nginx:模块开发与架构解析(第二版)》,陶辉
就绪列表的数据结构
就绪列表引用着就绪的socket,所以它应能够快速的插入数据。
程序可能随时调用epoll_ctl添加监视socket,也可能随时删除。当删除时,若该socket已经存放在就绪列表中,它也应该被移除。(事实上,每个epoll_item既是红黑树节点,也是链表节点,删除红黑树节点,自然删除了链表节点)
所以就绪列表应是一种能够快速插入和删除的数据结构。双向链表就是这样一种数据结构,epoll使用双向链表来实现就绪队列(对应上图的rdllist)。
索引结构
既然epoll将“维护监视队列”和“进程阻塞”分离,也意味着需要有个数据结构来保存监视的socket。至少要方便的添加和移除,还要便于搜索,以避免重复添加。红黑树是一种自平衡二叉查找树,搜索、插入和删除时间复杂度都是O(log(N)),效率较好。epoll使用了红黑树作为索引结构(对应上图的rbr)。
ps:因为操作系统要兼顾多种功能,以及由更多需要保存的数据,rdlist并非直接引用socket,而是通过epitem间接引用,红黑树的节点也是epitem对象。同样,文件系统也并非直接引用着socket。为方便理解,本文中省略了一些间接结构。
九、结论
epoll在select和poll(poll和select基本一样,有少量改进)的基础引入了eventpoll作为中间层,使用了先进的数据结构,是一种高效的多路复用技术。
再留一点作业!
下表是个很常见的表,描述了select、poll和epoll的区别。读完本文,读者能否解释select和epoll的时间复杂度为什么是O(n)和O(1)?


微信扫描二维码
(转载本站文章请注明作者和出处 鲁先生-hanlinsir)
Post Directory